-
MEMBERS ※As of April 2024 (Click here for previous members)
Department of Integrated Information Technology
Professor Hiroaki Yamaguchi (Representative) Research Associate Masato Kudo -
OVERVIEW
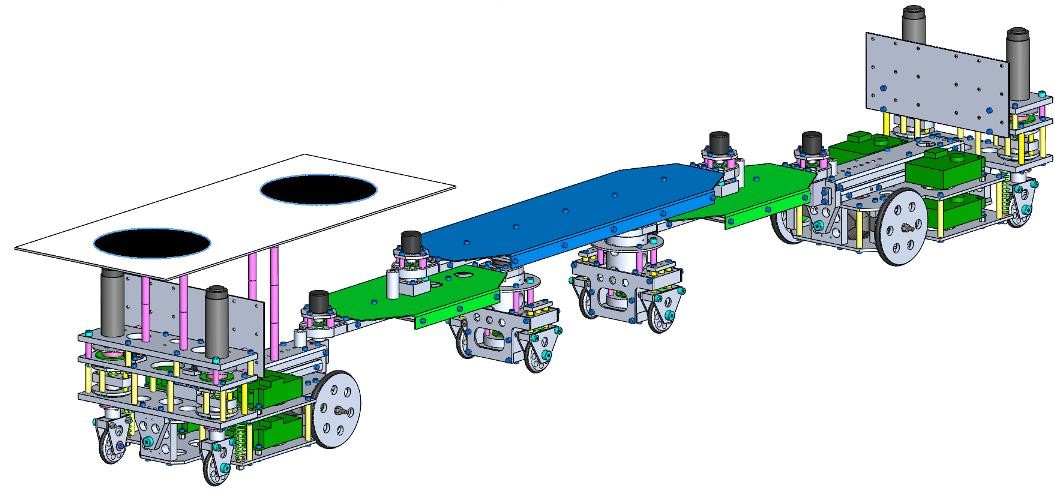
The objective of this research project is to establish a new feedback control design methodology in which the kinematic equations of wheeled-mobile mechanisms are converted into canonical form (chained form) by incorporating virtual mechanical elements.