-
構成メンバー
電気電子工学科 助 教(当時) 星野 健太(代表者) 電気電子工学科 教 授 米山 淳 - 概要
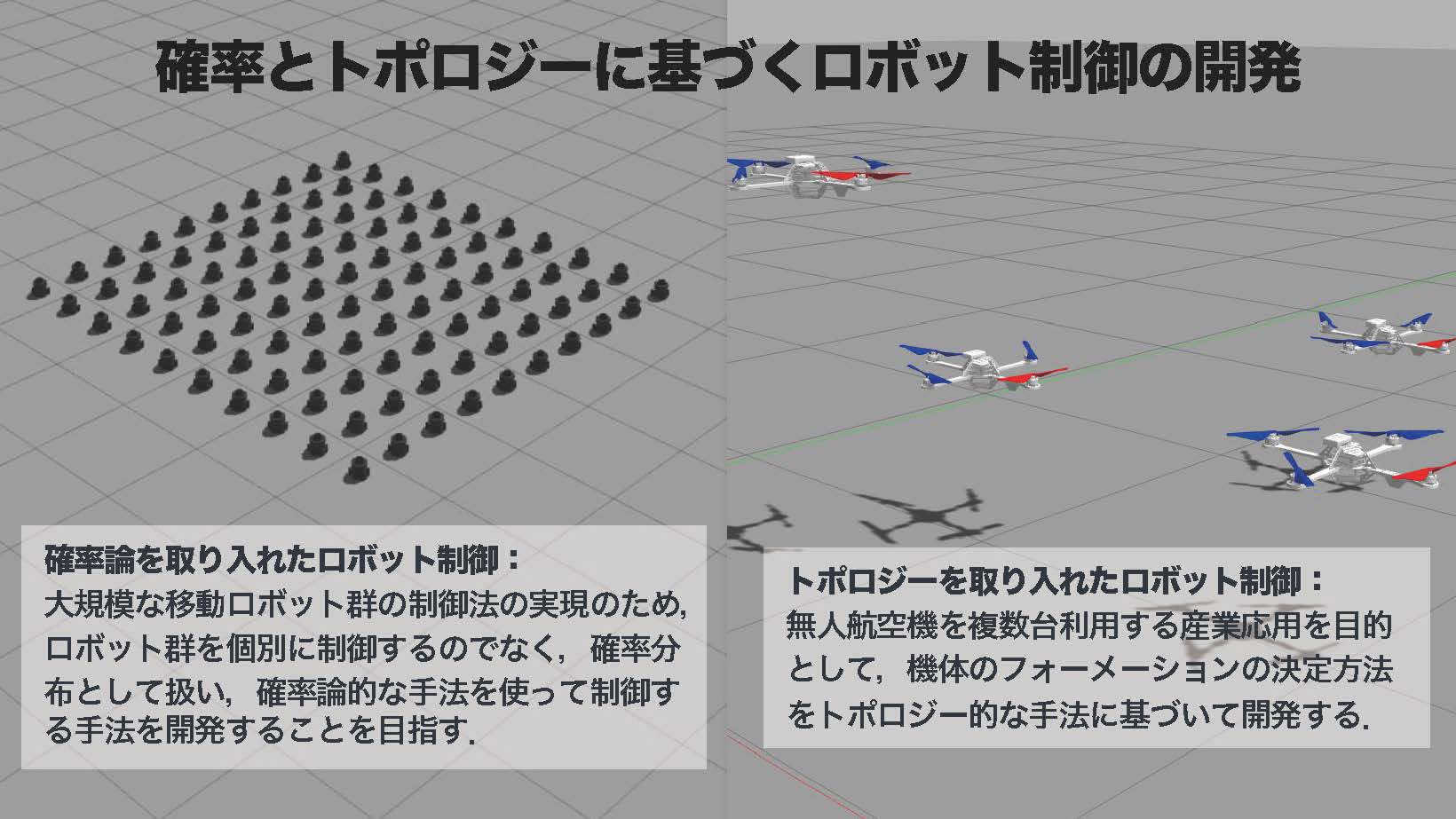
本プロジェクトは非線形制御理論を応用することにより,新たなロボットの制御手法を開発することを目的としている.無人航空機などの移動ロボットは,複数の機体を同時に利用することによって空撮や警備業務など様々な産業応用が期待できる.本プロジェクトでは,複数の機体を利用する際のフォーメーションの決定方法について,従来よりも柔軟な決定方法を数学のトポロジーと呼ばれる理論を利用することによって確立することを目指している.また,大規模なロボット群の制御手法を実現するため,ロボット群を確率分布とみなし,確率論の手法を取り入れることによってロボット群を制御する手法も開発する.