-
構成メンバー ※2025年4月現在 (これまでの構成メンバーはこちら)
情報テクノロジー学科 教 授 山口 博明 (代表者) 情報テクノロジー学科 助 手 工藤 聖人 -
概要
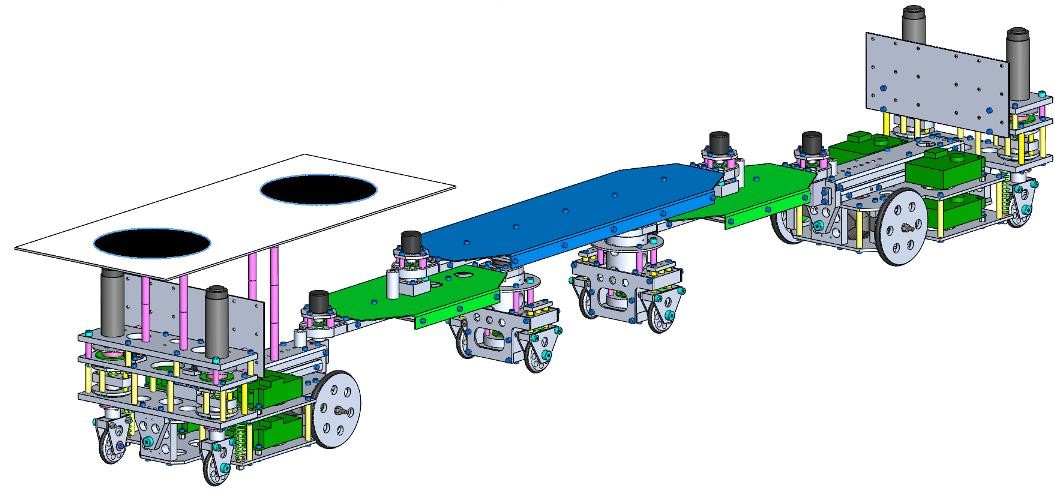
車輪型移動機構の運動学的方程式を微分幾何学・微分形式に基づいて,正準系であるチェインド・フォームへ変換し,フィードバック制御系を設計することが行われている.しかし,すべての車輪型移動機構の運動学的方程式を正準系へ変換できるわけではない.本研究では,仮想的な機械要素を導入するだけではなく,既存の機械要素を仮想的な機械要素に置き換える,あるいは,既存の機械要素を複数の仮想的な機械要素に分割するなどの新たなモデル化法を用いて,運動学的方程式を正準系に変換できない車輪型移動機構の制御入力を,仮想的な機械要素の導入・置換を伴う拡張モデルの正準系から算出する,新たな制御系の設計方法の確立を目的としている.